介绍MCMC采样算法的中文博客中,LDA数学八卦-3:MCMC 和 Gibbs Sampling堪称经典,这篇文章包括它的转载引用,相信引导了无数读者入门,包括我自己在内。但此文并非完美,文中有一处错误困扰我很久,对算法设计的动机方面也没有详细说明,本人经过查阅思考总结出这篇文章,算是对上面博客的补充,希望读者阅读之前先对上面文章内容有所了解,本文将不会对基础概念多加说明。下面如果提到这篇博客,将称之为“引用博客”。
本文主要内容包括
- 对MCMC采样算法思想的简单总结
- 对引用博客中的错误加以说明,并渗透性地对引用博客的说法进行补充
- 从算法设计者的角度出发来理解这些算法
- 开脑洞,做实验,解决疑惑
基本介绍
马尔科夫链采样
要生成服从目标分布的样本,如果知道它对应的状态转移矩阵,可以利用这个矩阵完成:随机确定一个初始值,根据状态转移矩阵随机转移,每次转移的结果记录下来,得到一组样本,从一个阈值往后截取,这部分样本就会服从目标分布。
由马氏链定理可知,一个状态转移矩阵多次转移可以收敛于一个特定分布;所以对任意初始点,经过足够多次转移后的每个状态,都会服从这个特定分布;因此这个过程截掉前半部分没有收敛时的样本,留下的就是服从这个分布的样本。
上面的过程中,我们已知状态转移矩阵\(P\),通过\(P\)的乘方可以计算出,通过这个状态转移矩阵生成的样本是服从什么样的分布。但是现实的问题往往是反过来,已知一个分布,要获得服从该分布的样本,我们如何找到这样一个\(P\)进行转移。
细致平稳条件
我们可以通过细致平稳条件来找这个\(P\)。
细致平稳条件是说:如果非周期马氏链的转移矩阵\(P\)和分布\(\pi(x)\) 满足
\[ \pi(i) P_{i j}=\pi(j) P_{j i} \quad \text { for all } i, j \]
则\(\pi(x)\)是马氏链的平稳分布。这是平稳分布的充分条件而非必要条件,即这是一个更强的条件。直观理解如下
- 平稳分布指对任意一个状态,从这个状态转移出去的概率质量等于转移进来的概率质量,所以\(\pi(x)\)经过\(P\)转移后,每个状态的概率都没有变。
- 细致平稳条件指对任意两个状态\(i\)和\(j\),每一次转移\(i\)转移给\(j\)的概率质量等于\(j\)转移给\(i\)的概率质量;因此细致平稳条件更细节,它满足则平稳分布一定满足。
证明:我们想证满足细致平稳条件的\(\pi\),可以使\(\pi P=\pi\)成立(因为满足这个式子的\(\pi\)是唯一的,所以只要这个式子成立就是平稳分布);只需要证对每个\(j\),都有
\[ \sum_{i=1}^{\infty} \pi(i) P_{i j}=\pi(j) \]
成立。证明如下
\[ \sum_{i=1}^{\infty} \pi(i) P_{i j}=\sum_{i=1}^{\infty} \pi(j) P_{j i}=\pi(j) \sum_{i=1}^{\infty} P_{j i}=\pi(j) \tag{1} \]
现在,回到找\(P\)的问题上来,我们原来是要找到一个\(P\),满足\(\pi\)是这个\(P\)对应马氏链的平稳分布;现在我们只需要找到一个\(P\)满足细致平稳条件。
MCMC采样算法
我们要找一个\(P\)满足这个公式
\[ \pi(i) P_{i j}=\pi(j) P_{j i} \quad \text { for all } \quad i, j \]
先随便找一个转移矩阵\(Q\),一般\(Q\)不满足细致平稳条件,即
\[ \pi(i) Q_{ij} \neq \pi(j) Q_{ji} \]
但我们可以乘一个数令它满足,令\(\alpha_{ij}=\pi(j) Q_{ji}\),则
\[ \pi(i) Q_{ij} \alpha_{ij} = \pi(i) Q_{ij}\pi(j) Q_{ji}= \pi(j) Q_{ji}\pi(i) Q_{ij}=\pi(j) Q_{ji} \alpha_{ji} \]
令\(Q'_ {ij} = Q_{ij} \alpha_{ij}\),则满足
\[ \pi(i) Q'_ {ij} = \pi(j) Q'_{ji} \]
但是要注意,\(Q'\)仍然不是我们要找的\(P\),因为它不是一个概率转移矩阵,它的每一行加起来不是1,也更谈不上它满足细致平稳条件。如果用这个矩阵去转移,最后不会收敛到一个分布(乘方趋于0)。而且MCMC算法也不是这样做的。
这里我们也把MCMC算法的截图放上来
算法中不是将\(Q'\)当做一个整体来看待,而是拆分成转移概率\(Q\)和接受率\(\alpha\),假设从\(i\)转移到\(j\)的过程中
- 从\(Q\)中选到状态\(j\),同时还被接受了,才真正完成转移,概率其实就等于\(Q_{ij}\alpha_{ij}=Q'_{ij}\)
- 如果没被接受,则相当于转移到了\(i\)自身
- 可以看到,算法中从\(i\)转移到\(\forall j\neq i\)时,是按照\(Q'_ {ij}\)的概率;但从\(i\)转移到\(i\)时的概率不止是\(Q'_{ij}\)的概率,而且加上了剩余的所有概率(因为\(Q'\)每一行加起来不足1)
因此我们要找的\(P\)就浮出水面了,即把\(Q'\)每一行不足1的那部分概率全加到对角线上,得到的新矩阵\(Q^*\)就是我们要找的\(P\)。
MCMC算法的过程,就等价于拿这个\(Q^*\)直接转移。
这样做确实满足每一行概率和是1了,但是它是否仍然满足细致平稳条件呢?
仍然满足!
- 对于\(i\neq j\)的情形,数字没有变化,因此公式依然成立
- 对\(i=j\)的情形,对角线数值改变,等式两边会同时改变,所以式子依然成立
因此\(Q^*\)就是我们要找的转移矩阵。
补充说明
- \(Q'\)不是转移矩阵这一点就是引用博客以及几乎所有中文博客的误区。
- 我们说\(Q'\)不是转移矩阵,但它仍满足细致平稳条件的那个公式,会不会从这个公式依然可以推出平稳分布呢(关注式子\((1)\))?不会。看式子\((1)\)的最后一步,因为\(P\)加和不是1,所以最后一步不成立。
- 看过引用博客的读者可能会有这样的疑问:为什么在被\(\alpha\)拒绝之后要令\(X_{t+1}=x_t\),而不是忽视此轮重新抽样?希望能从\(Q^*\)的构造中得到解答。
- 我们虽然能理解为什么\(X_{t+1}=x_t\),但“忽视此轮重新抽样”的方式真的不能达到目标吗?不能。因为这相当于将停留在原地的很多样本去掉,虽然样本停留在原地这种情况在每一个状态中都会发生,但量不一样,这就要看\(Q'\)每行不足1的概率大小了。这一点会在下一节的最后一部分代码中得到检验。
- 按照构造\(Q^*\)的思路,剩余的概率只有加到对角线上才行吗?是的,如果加到其他位置将违反细致平稳条件。
- 为什么MCMC算法要有接受率\(\alpha\)这个说法,直接说\(Q^*\)不就好了?因为后者只是在这个例子中有效,这一点会在后文详细说明。
MCMC采样算法实现
下面我们用一个简单的例子验证上述的说法,使用R语言
\(Q'\)说明
1 | library(expm) # 矩阵乘方 %^% |
输出结果
1 | > alpha |
可以看到,\(Q'\)每一行加总不足1,用\(Q'\)来转移,概率会越来越小。
\(Q^*\)说明
1 | # 将剩余的概率加到对角线上 |
输出结果
1 | > q2 |
可以看到,\(Q^*\)迭代多次可以趋近于目标分布\(\pi\)
MCMC算法采样
这里我们用标准的MCMC算法进行采样,使用转移矩阵\(Q\)生成目标分布\(\pi\)
1 | # 目标分布pi |
输出结果
1 | > freq <- table(x) |
可以看到样本基本服从目标分布
转移矩阵采样
这里我们直接构造转移矩阵\(Q^*\)进行采样,本质上和MCMC采样相同
1 |
|
输出结果
1 | > freq <- table(x) |
错误采样方式
下面展示按照“忽视此轮重新抽样”的方式采样,得到的样本分布无法保证是目标分布
1 | # 目标分布pi |
输出结果
1 | > freq <- table(x) |
可以看出,\(Q'\)中第二行有更多概率会被归入对角线中,而“忽视此轮重新抽样”的方式会将这部分概率抹去。因此得到的样本中,状态2的概率下降0.1左右,是第二行不足1的部分比其他两行多0.1左右造成的。
MCMC采样算法改进
上述MCMC算法采样代码中显示,需要100000次迭代才能产生较满意的结果,这是接受率\(\alpha\)太低、导致太多原地踏步造成的。如果能把接受率调高一些,状态之间的转移会更加灵活,需要的迭代次数也可大大降低。
我们先来回顾一下细致平稳条件
\[ \alpha_{ij}=\pi(j) Q_{ji} \]
\[ \pi(i) Q_{ij} \alpha_{ij} =\pi(j) Q_{ji} \alpha_{ji} \]
如果我们将\(\alpha\)整体扩大\(k\)倍,显然细致平稳条件仍然成立,则
\[Q'_ {ij}=kQ_{ij}\alpha_{ij}\]
这个\(Q'\)的每一行加和也不能保证等于1;同时我们在扩大\(\alpha\)时,需要保证\(Q'\)的每一行不超过1,因此扩大的最大程度只能是:使\(Q'\)的某一行加和为1,同时其他行加和不超过1。这样扩大后,可以再将每一行不足1的部分补到对角线上。这个改进效果非常好,我们来看代码
1 | # 目标分布pi |
先来看看新的转移矩阵\(Q^*\)如何收敛到目标分布
1 | # 现在的方式迭代20次效果已经很好 |
新的\(Q^*\)只需要20次就可以达到很好的效果,之前则需要上百次。
1 | > q2 |
对比两个\(Q^*\)可以发现,之前的有太大概率集中在对角线上,而改进后的方案则均匀很多。
采样
1 | # 随机初始点 |
输出结果
1 | > freq <- table(x) |
可以看到,使用新的\(Q^*\)可以用更少的迭代次数达到差不多的精度。
从本节的改进可以看出,虽然给定一个转移矩阵会对应唯一个平稳分布,但是给定一个平稳分布会对应无数转移矩阵,因此要高效生成平稳分布的样本,选择一个好的转移矩阵至关重要。
MH算法
Metropolis-Hastings 算法也是MCMC采样算法的改进,思路和上一节类似,但做法不同。还是回顾细致平稳条件
\[ \alpha_{ij}=\pi(j) Q_{ji} \]
\[ \pi(i) Q_{ij} \alpha_{ij} =\pi(j) Q_{ji} \alpha_{ji} \]
同样,考虑将\(\alpha\)扩大,此处我们不会将\(\alpha\)矩阵所有值扩大相同倍数,而是对称位置扩大相同倍数。观察上述公式,只要\(\alpha_{ij}\)与\(\alpha_{ji}\)扩大相同倍数,细致平稳条件就仍然成立。而\(\alpha\)作为接受率,不能超过1,因此就对每一个对称位置都分别扩大到其中一个为1,另一个不超过1。这就是MH算法。用公式表示如下
\[ \alpha'_ {ij}=\min \left\{\frac{\alpha_{ij}}{\alpha_{ji}}, 1\right\} =\min \left\{\frac{\pi(j) Q_{ji}}{\pi(i) Q_{ij}}, 1\right\} \]
迭代过程与MCMC采样算法相同,只是\(\alpha\)的计算不同而已
1 | # 目标分布pi |
查看\(\alpha'\)结果
1 | > alpha2 |
采样
1 | # 随机初始点 |
输出结果
1 | > freq <- table(x) |
可以发现,MH算法相比于MCMC采样算法,效率上有很大的提升,与上一节的改进算法差不多。
两种改进算法对比
效果对比
前面两节我们使用了两种方式对MCMC采样算法进行改进,效果差不多,但是只有MH算法留在了教科书中,这是为什么呢?
它们的唯一差别在于\(\alpha\)扩大时的不同
- 第一种:全局扩大相同比例,限制是\(Q'\)每行加和不能超过1
- MH:对称位置扩大相同比例,限制是\(\alpha\)值不能超过1
还是把细致平稳条件公式放上来
\[ \alpha_{ij}=\pi(j) Q_{ji} \]
\[ \pi(i) Q_{ij} \alpha_{ij} =\pi(j) Q_{ji} \alpha_{ji} \]
\[ Q'_ {ij} = Q_{ij} \alpha_{ij} \]
按照第一种扩大方式,\(\alpha\)值是可以超过1的;按照第二种扩大方式,\(Q'\)每行加和仍然不会超过1。所以说第一种方式扩大的程度更大,效果可能也会更好,而实际上流传下来的是第二种方法。
这就涉及一个问题:为什么要提出“接受率”这个概念?MCMC算法中不定义接受率也可以转移,思路更清晰、代码更简洁,但它却从“接受率”的角度来写;以MH算法中为了保证接受率有意义,而限制了\(\alpha\)的放大。为什么接受率这么重要?
因为不用接受率的版本无法应用到实际问题之中。
连续情形
为了说明马尔科夫的收敛性,我们引入转移矩阵,一直用这个离散的例子进行说明,而MCMC算法创造时要解决的问题显然不是生成一个简单的离散分布。MCMC算法以及改进的MH算法是用于生成一些非常见分布的随机样本,这些分布可以是离散的也可以是连续的,可以有无穷多取值。我们来看看连续版本的公式
目标:生成分布\(\pi(x)\)的样本,使用工具分布\(q(y|x)\),计算接受率如下
\[ \text{MCMC:}\quad \alpha(x, y)=\pi(y) q(x|y) \]
\[ \text{MH:}\quad \alpha(x, y)=\min \left\{1, \frac{\pi(y) q(x | y)}{\pi(x) q(y | x)}\right\} \]
细致平稳条件
\[ \pi(x) q(y|x) \alpha(x,y) =\pi(y) q(x|y) \alpha(y, x) \]
这里的工具分布(proposal)就是原来的转移矩阵,从状态\(i\)到状态\(j\)转移一次的过程,就相当于从条件分布\(q(y|x=i)\)中生成一个样本\(j\)。下面对比两种改进方式
MCMC及MH算法过程
MCMC及MH算法的思想就是,直接从目标分布\(\pi(x)\)中生成样本非常困难,于是我们找来一个条件分布\(q(y|x)\),从这个分布中生成样本比较容易,但这个条件分布是随便找的,不可能用它转移得到的样本都满足要求,所以要通过接受率进行筛选。
这个过程中,每一次迭代都有一个初始值\(i\),从工具分布\(q(y=j|x=i)\)中抽取样本\(j\),有了\(i,j\)和\(\pi\)与\(q\)的公式形式后\(\alpha(i,j)\)显然可以算出,整个生成过程可以实现。
第一种改进的方法
第一步:计算
\[ q'(y|x) = q(y|x)\alpha(x,y) \]
第二步:从\(q'\)计算\(q^*\)。要对任意的\(i\),将\(q'(y|x=i)\)不足1的部分补到\(q'(y=i|x=i)\)上。
这两步都存在问题
- 第二步中要算出不足1的部分需要对这个函数积分,这个积分过程繁琐不说,还不一定能实现
- 第一步中计算的\(q'\)是多个式子相乘后的结果,形式可能非常复杂,导致无法从这个分布中抽样,违背了引入\(q\)的初衷
因此在连续问题中,第一种改进方案几乎不可行,这就是接受率重要的原因。细想一下,两种做法的区别在于
- 第一种是事先把原材料都准备好,在迭代过程中只要带入表达式计算,这在一般问题中是不现实的
- MH算法的思想是遇到了再现算
MH算法与Rejection Sampling的关系
如果对Rejection Sampling不了解可以先参考这篇文章。
回顾Rejection Sampling
要生成目标分布\(p(x)\)的样本,直接生成非常困难,我们可以从一个简单的分布\(q(x)\)中不断生成样本,再设置一个接受率对每次生成的样本进行筛选。
算法步骤
- 用一个合适的分布\(q(x)\),找到一个数\(k\),使对所有\(x\)值,\(kq(x)\)都比\(p(x)\)大
- 下面过程迭代,直到获得n个样本
- 从\(q(x)\)中生成一个样本\(z\)
- 从\(0-kq(z)\)的均匀分布生成\(u\)
- 如果\(u < p(z)\)则接受样本\(z\)
- 如果\(u > p(z)\)则拒绝样本\(z\),即忽视此轮迭代
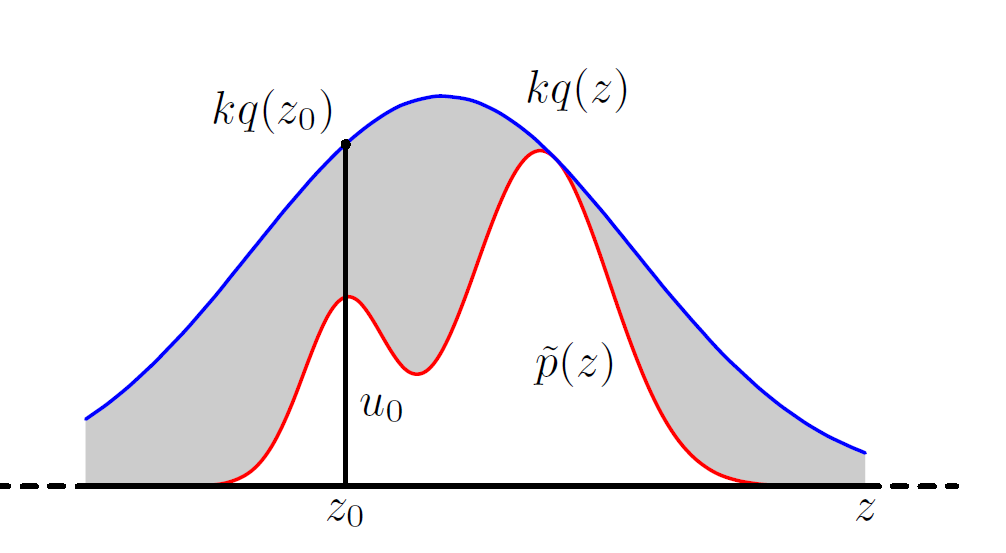
在这张图中即筛选时落入灰色区域则拒绝,落入白色区域则接受。Rejection Sampling非常符合直觉。
补充
- 什么样的\(q\)是合适的?只要能找到这么一个\(k\),使\(kq(x)\)总比\(p(x)\)大就行
- 那么什么时候会找不到呢?比如目标分布是\(t\)分布,而你如果想让\(q\)服从正态分布,则无法找到这个\(k\);因为\(t\)分布厚尾,在\(|x|\)很大时正态分布下降的速度太快,无论用多大的\(k\)都没办法让它在\(t\)分布上方。
- 即使是合适的\(q\)也有好坏之分,评定原则是与目标分布越相近的越好,因为拒绝区域越少,算法效率越高
MH算法与Rejection Sampling的类似点
- 二者的抽样过程类似
- 都是用一个工具分布产生样本,设置一个接受率
- 但不同的是前者拒绝后会使用上一轮的值,而后者会忽视此轮,因此二者无法等价
- 也不能说哪个的效率更高,因为废弃样本和停滞在原地都不利于抽样
- 二者要解决的问题类似
它们都用于对不常见分布进行抽样
- 可以是那些已知\(p(x)\)函数形式,但难以建立与均匀分布之间联系的分布
- 也可以是\(p(z)=\frac{1}{Z_{p}} \widetilde{p}(z)\)这种形式,即我们知道\(\widetilde{p}(z)\)的形式,但是不知道\(Z_p\)的值(\(Z_p\)是一个常数,用于将概率加总归一化到1),所以无法知道确切的分布。贝叶斯统计中的后验分布一般都是这种形式,如果\(\widetilde{p}(z)\)的积分难求,则\(Z_p\)无法计算。从两个方法的过程来看,我们不需要知道\(Z_p\)的值即可对这个分布进行采样
举例:已知先验分布\(\theta \sim Gamma(\alpha, \beta)\),\(Y_1,...,Y_n\)样本来自\(N(\theta,1)\),要生成服从后验分布的样本。
特殊工具分布
如果MH算法的工具分布\(q(y|x)\)特殊,则接受率可以简化
\[ \alpha(x, y)=\min \left\{1, \frac{\pi(y) q(x | y)}{\pi(x) q(y | x)}\right\} \]
- 独立
即工具分布是独立于\(x\)的,\(q(y|x)=q(y)\),接受率公式如下
\[ \alpha(x, y)=\min \left\{1, \frac{\pi(y) q(x)}{\pi(x) q(y)}\right\} \]
此时,所有候选样本都是从同一个分布生成,更加类似Rejection Sampling,因为它的接受率可以写成这种形式
\[ \alpha(y) = \frac{\pi(y)}{k q(y)}, \quad\text{其中} k = \max_y \frac{\pi(y)}{q(y)} \]
但是二者依然不同。
- 对称(这部分与对比无关,只是补充这种特殊情况)
即\(q(y|x)=q(x|y)\),则
\[ \alpha(x, y)=\min \left\{1, \frac{\pi(y) }{\pi(x) }\right\} \]
一个对称分布的例子:\(y|x\sim N(x, 1)\),则对已知的\(x,y\)有\(q(y|x)=q(x|y)\)
全局与局部
- Rejection Sampling是从全局找目标分布的近似,用其密度函数的包络线生成样本再筛选,但是全局近似可能在很多位置与目标相差太远,而且工具分布选择要考虑所有取值来确定
- 而MH算法每次使用的工具分布不同,相当于是在局部找近似,在每一步确定工具分布时不需要考虑目标整体,顾虑较少;同时也不需要考虑\(k\)能否计算
高维情况
二者都可以直接应用到多元分布采样上,只是一般此时接受率都非常低,算法效率不高。MH算法的一个优势在于Gibbs采样的扩展,可以对一些多元分布高效采样。
回到最初的话题,已知目标分布,我们希望找到一个转移矩阵(条件概率)满足细致平稳条件。在之前的问题中,这个转移矩阵需要各种构造,但是在多元分布采样中,它是现成的,完美满足细致平稳条件,是以算法中甚至没有“接受率”的存在。
Gibbs采样的细致平稳条件公式如下
\[ \begin{array}{l} {p(x_{1}, y_{1}) p(y_{2} | x_{1})= p(x_{1}) p(y_{1} | x_{1}) p(y_{2} | x_{1})} \\ {p(x_{1}, y_{2}) p(y_{1} | x_{1})= p(x_{1}) p(y_{2} | x_{1}) p(y_{1} | x_{1})} \end{array} \]
所以
\[ p(x_{1}, y_{1}) p(y_{2} | x_{1})=p(x_{1}, y_{2}) p(y_{1} | x_{1}) \]
工具分布用的是\(p(y_2|x_1)\),而不是\(p(x_2,y_2|x_1, y_1)\),是因为要沿着与轴平行方向转移,固定其他轴的值不变。只要每次沿着与轴平行方向转移,都满足细致平稳条件,得到的样本是服从目标分布。
gibbs采样适用于多元分布较难抽样,但容易从条件分布中抽样的情况。举例如下
要生成这个分布的样本
\[ p(x, y)=\frac{n !}{(n-x) ! x !} y^{(x+\alpha-1)}(1-y)^{(n-x+\beta-1)}, \quad x \in\{0, \ldots, n\}, y \in[0,1] \]
这不是常见分布,难以直接抽样,但是它的条件分布都是常见分布
- \(p(x | y) \equiv \operatorname{Bin}(n, y)\)
- \(p(y | x) \equiv \operatorname{Beta}(x+\alpha, n-x+\beta)\)
参考资料
参考资料
- LDA数学八卦
- 贝叶斯统计及其R实现,作者黄长全老师
- PRML第11章
- lecture note
- 英文博客
- 刘建平博客
继续阅读
- MH算法的工具分布如何选取
- burn-in多少样本
- 如何检验样本已经收敛
- 生成的样本不独立,间隔多少取一个最合适
- Accelerating MCMC Algorithms
- Burn-In is Unnecessary
- Many short runs can sometimes give a better answer
- MCMC包
- 等等